About the Author
Meredith Christman
Product Marketing Manager, PCB Piezotronics

As predictive maintenance teams in industrial facilities strive for a more complete picture of their equipment’s health, high frequency vibration measurements have become a crucial addition to identify faults such as motor and pump bearing defects and gear tooth inconsistencies in high-speed gearboxes. As a result, there is an upsurge in demand for vibration sensors with a high frequency response.
What determines the resonant frequency (and therefore high frequency response) of an accelerometer? For that answer, a look into the field of physics and the spring- mass harmonic isolator are required.
A spring-mass harmonic isolator consists of a spring hung vertically from a support structure. A weight is attached to the end of the spring. By pulling the weight down and then releasing, the weight/spring assembly will oscillate evenly (both in speed and distance) back and forth across an equilibrium position, re-creating the oscillation of a sinusoidal wave.

While the amplitude of the resulting oscillations can be theorized using Newton’s Second Law of Motion (F=ma), the primary interest of this article is the speed of the resulting oscillations. The speed of the resulting oscillations can be theorized using Hooke’s Law (Robert Hooke, late 1670s). Hooke proclaimed that natural/resonant frequency is a function of stiffness and mass, as seen in the formula below. In the spring-mass harmonic isolator example, the mass of the weight and the stiffness of the spring are pre-determined so the assembly’s oscillation speed cannot be altered unless either the spring or the weight are switched out for an alternative.
Based on the formula above, it can be seen that resonant frequency and mass have an inverse relationship while resonant frequency and stiffness have a direct relationship. In the world of accelerometers, the mass of the weight correlates to the mass of the accelerometer while the stiffness of the spring correlates to the stiffness of the accelerometer’s mounting. To achieve high frequency measurements, an accelerometer must be as small as possible and have as stiff of a mounting methodology as possible. Each of these two factors are explored in detail in the following sections.

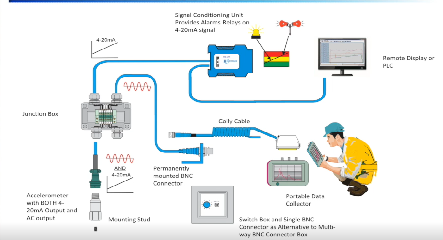
There are several common methodologies used for vibration sensor mounting. These include stud mounting, adhesive mounting, use of a mounting pad and use of a magnet. The characteristics of each mounting methodology are described below.

Sensor manufacturers continue to make smaller and smaller accelerometers in order to satisfy customers’ requests for sensors capable of high frequency measurements. This effort is challenging as they must balance the small size with the need for a rugged sensor that can withstand the harsh environments to which they are usually subjected.
Most industrial customers require:
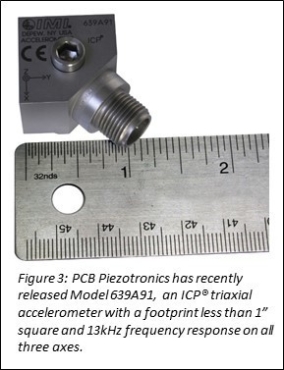
Despite the challenges, sensor manufacturers like PCB Piezotronics, Inc. have been able to successfully shrink the size of industrial accelerometers to a size close to that of a quarter. Their newest high frequency model, Model 639A91, is a triaxial ICP® accelerometer that measures just 0.95 inch by 0.95 inch (excluding the side exit connector) and features a 13 kHz frequency response on all three axes. It features a case-isolated housing of 316L stainless steel and rugged four- pin M12 connector.
High frequency measurements are gaining prominence with industrial predictive maintenance teams as they strive to have the most complete picture possible of a piece of equipment’s health. The size of the sensor and the stiffness of sensor mounting methodology are the two most important factors contributing to a sensor’s ability to successfully provide high frequency measurements.