In vibration analysis terminology, Amplitude Modulation -just like in telecommunication- results when a certain frequency component is amplitude-modulated according to a specific time-dependent function. Amplitude modulation is very common phenomenon in machinery vibration. Some examples of the cases that produce vibration signal with amplitude modulation are:
The rolling elements bearing with defective rotating inner race will exhibit shocks of variable amplitude as the defect passes through the load zone. The rate of amplitude modulation is 1X.
The rolling elements bearing with defective ball will also exhibit amplitude modulation but at the cage frequency since the defective ball passes through the load zone at the cage frequency.
An eccentric gear will excite vibration at the gear meshing frequency that is amplitude modulated at the shaft rate due to the variation of the contact forces between the meshing gears.
An induction motor with defective or broken rotor bar will produce vibration at harmonics of 1X that is amplitude modulated with the pole pass frequency.
Generally, when the vibration signal is amplitude modulated, it can be modeled as in eq. (1)
Where is the center frequency and A(t) is the amplitude modulation function. The simplest form of the modulation function can be represented by a constant value in addition to a sinusoidal component: . Therefore:
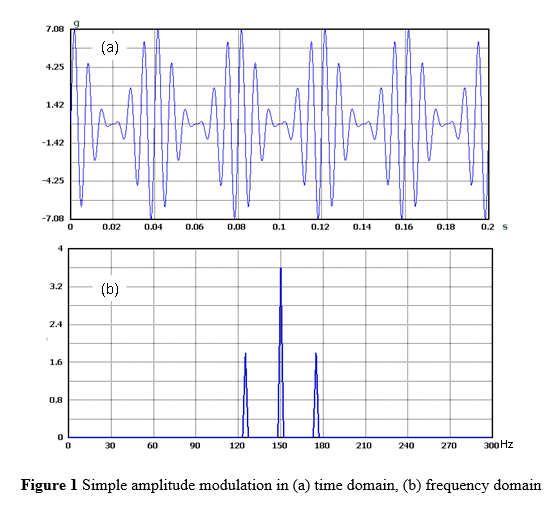
It is clear from eq. (2) that when the signal x(t) is Fourier transformed, it will show a peak of amplitude a0 and frequency ωc with sidebands of amplitude a1/2 spaced at ω1 on both sides of the center frequency. Figure 1 (a) and (b) show the time waveform and spectrum for a signal with center frequency fc = 150 Hz having amplitude a0= 3.6 g, modulated by a sinusoid of a1 =3.6 g and frequency f1= 25 Hz.
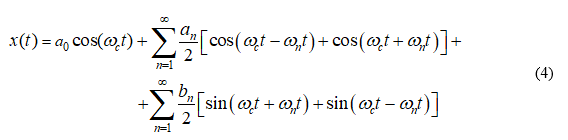
Generally, when A(t) is any other function of time such as repetitive impacting, saturated sine, square wave or any other function, the Fourier series theorem states that A(t) can be written as:
Where is the fundamental frequency of the modulating function. Hence:
It is clear from eq. (4) that, depending on the modulating function, there will be generally multiple sidebands around the center frequency positioned at multiples of the fundamental modulating frequency with amplitudes that depend on the shape of the modulating function.
Jaafar AlsalaetSenior Consultant and Instructor, SFC CO LTD
Jaafar Alsalaet Received his MSc and PhD degrees in mechanical vibration from the College of Engineering, university of Basrah, in 1998 and 2012 respectively. He has more than 22 years of experience in the fields of condition monitoring, vibration analysis and dynamic balancing. He has been involved in the designing of CBM programs and solving many rotating machines problems for industrial firms since 1998. He has worked as an instructor for Mobius Institute CAT-I and CAT-II vibration analysis courses since 2019.
By using this site you agree to our use of cookies. You are free to manage this via your browser setting at any time. To learn more about how we use the cookies please see our cookies policy.